This website uses cookies for analyzing traffic and improving user experience through Google Analytics. These cookies help us gather information about how you use our site. Your data is anonymized and is not used to identify users. Do you agree to the use of analytical cookies?
Unsere Arbeiten basieren auf terrestrischem Laserscanning.
Der 3D-Scanner wird an sorgfältig ausgewählten Standorten positioniert, um das gesamte Objekt zu erfassen.
Diese Methode bildet die Grundlage präziser und zuverlässiger Auswertungen.
Im Laufe der Jahre haben wir verschiedene Scanner eingesetzt, darunter Riegl VZ-400, Z+F 5004, Z+F 5006i, Faro, Callidus und Leica P20.
Derzeit arbeiten wir hauptsächlich mit dem Leica P40, der höchste Messgenauigkeit gewährleistet.
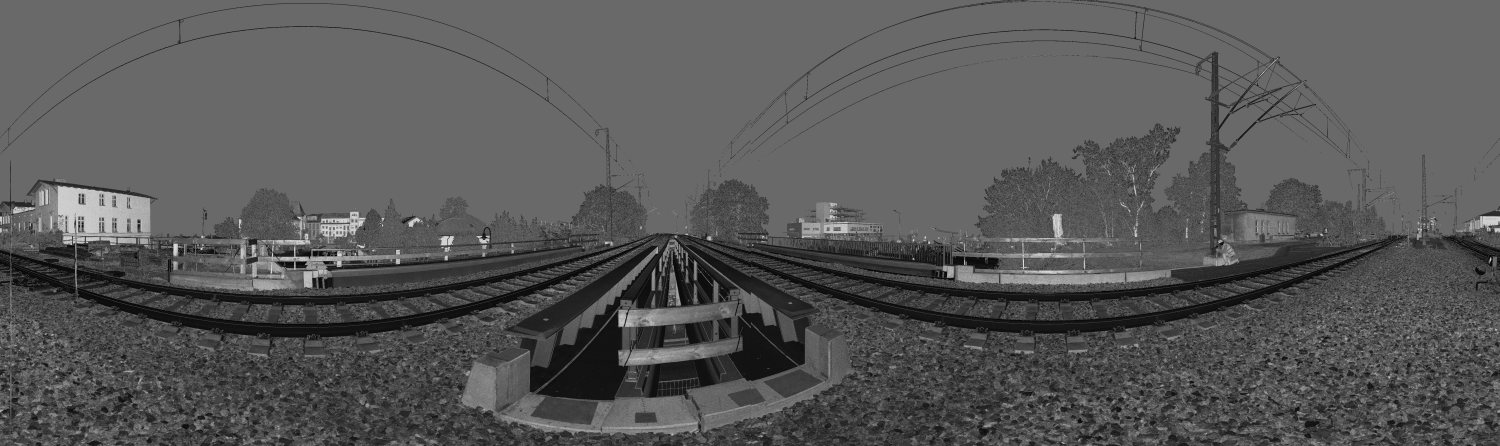
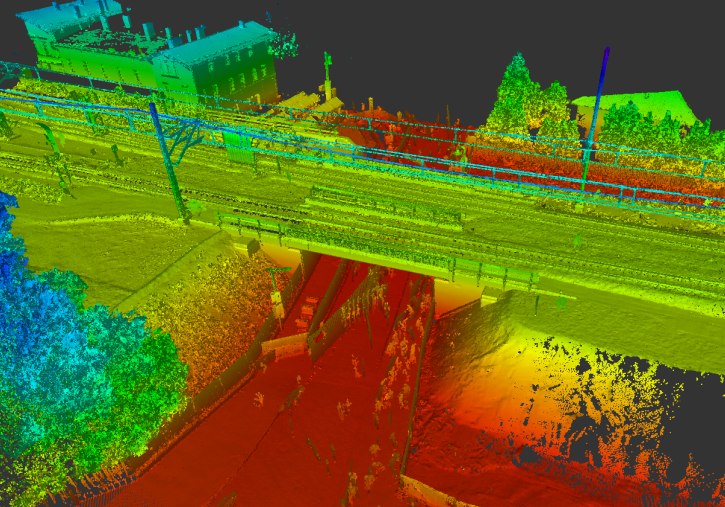
Der Laserscanner misst mithilfe eines Laserstrahls Millionen von Punkten in seiner Umgebung – er erfasst alles, was er „sieht“.
Weiter entfernte Elemente werden mit geringerer Punktdichte aufgenommen, nahe Objekte deutlich dichter.
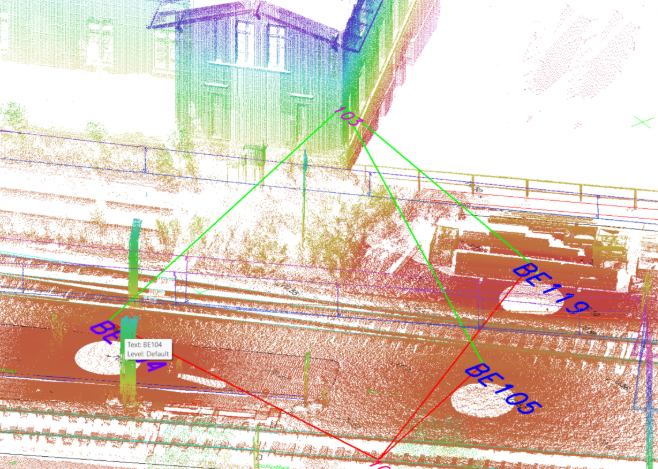
Das erste Beispiel zeigt eine Panoramaansicht des Sichtfeldes.
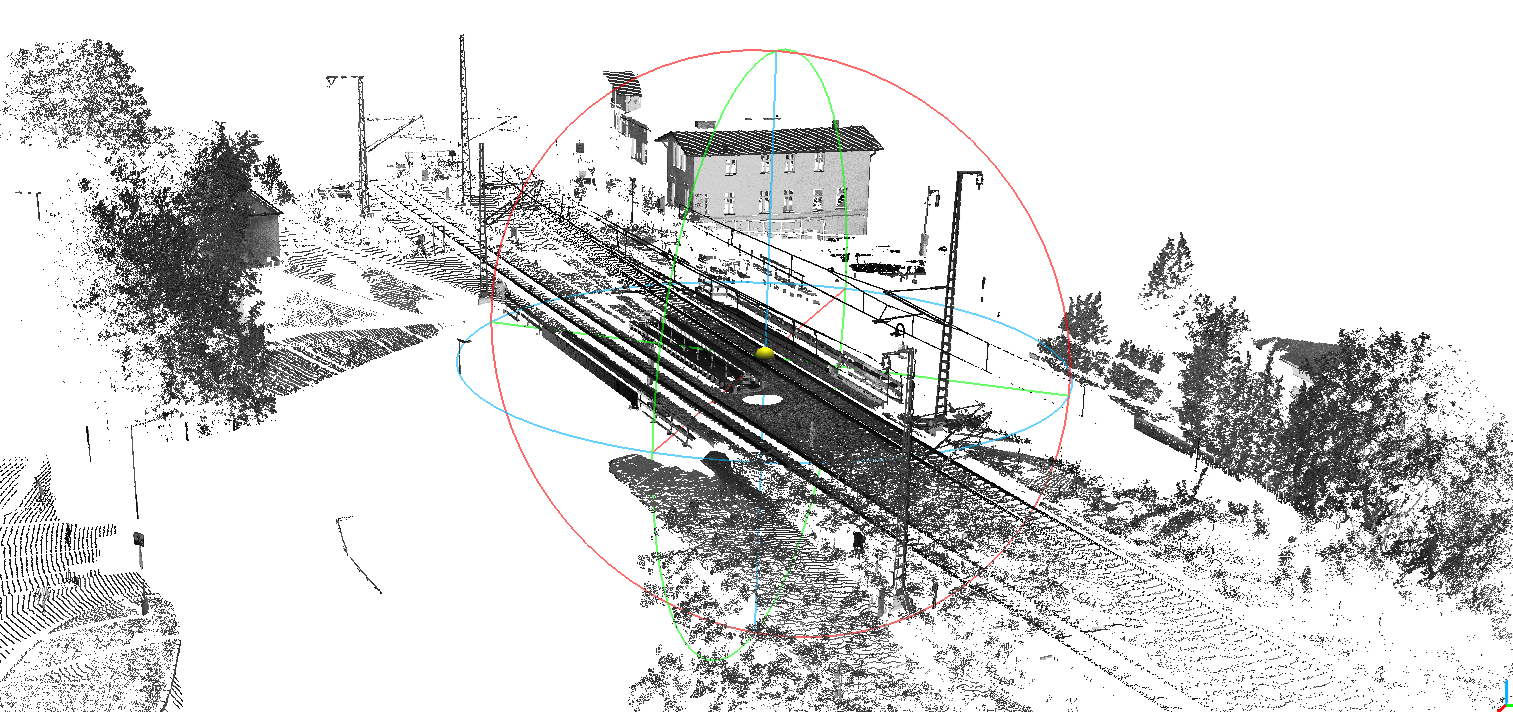
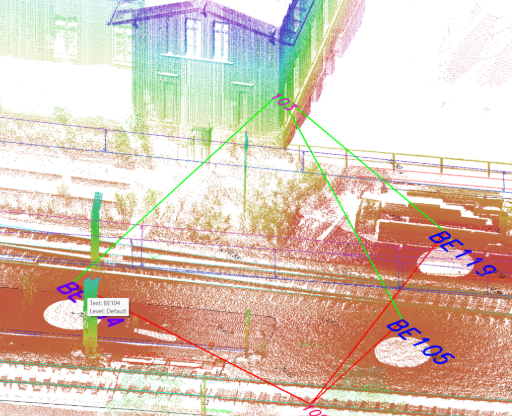
Das zweite Bild stellt den Scanstandort und die tatsächliche Reichweite dar.
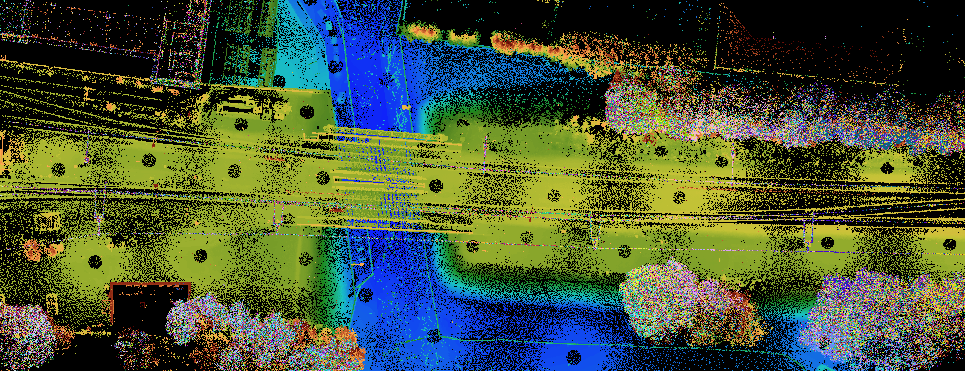
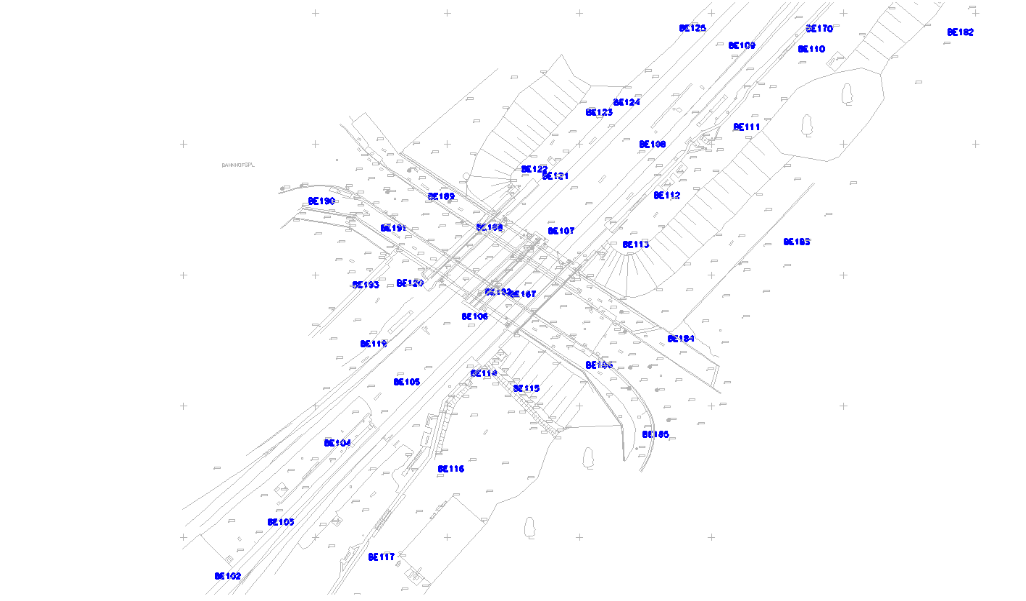
Bei einem Objekt führen wir von mehreren Dutzend bis zu mehreren Tausend Scans durch.
Die sichtbaren Kreise markieren die Scannerstandorte, die blauen Nummern kennzeichnen deren Positionen.
Vor Beginn des Scannens platzieren wir an ausgewählten Stellen Zielmarken, die zusätzlich mit geodätischen Methoden eingemessen werden.
So erhalten wir die Koordinaten von Kontrollpunkten, die für die Berechnung und Ausgleichung der gesamten Punktwolke erforderlich sind.
Registrierung
Die Bestimmung der Scannerstandorte ist ein entscheidender Schritt der Auswertung.
Die sogenannten „Registrierungs“-Berechnungen verbinden einzelne Scans zu einer einheitlichen Punktwolke.
Wir haben eine eigene Software entwickelt, die auf bewährten geodätischen Methoden basiert.
Dabei verwenden wir die Methode der kleinsten Quadrate sowie ein indirektes Verfahren, bei dem komplette Scans als starre Körper (Rigid Bodies) transformiert werden.
Die Transformation erfüllt die Bedingung:
∑i=1n pi vi2 → min
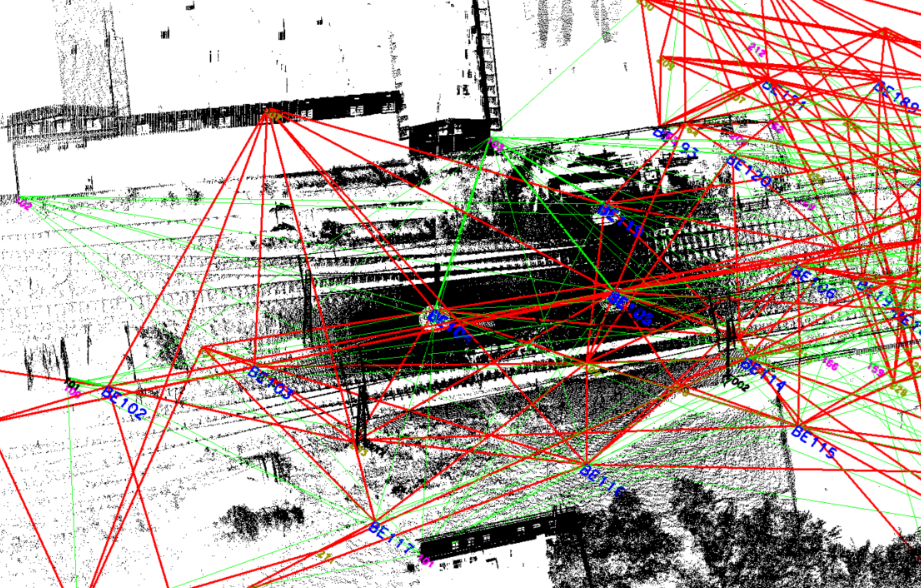
Die Berechnung erfolgt durch Identifikation identischer Elemente in verschiedenen Scans, z. B. einer Gebäudeecke (XY) oder der Schienenoberkante (Z).
Durch die Messung einer ausreichenden Anzahl von Verknüpfungspunkten entsteht ein dichtes Netzwerk zwischen den Scans.
Die Berechnungen bestehen darin, die Scans so zu verschieben und zu drehen, dass die Verbindungen die Bedingung pvv = Minimum bestmöglich erfüllen.
In diesem Stadium haben wir die volle Kontrolle über den Prozess.
Wir können Ausreißer identifizieren, Fehlerursachen analysieren und die Qualität der Kontrollpunkte bewerten.
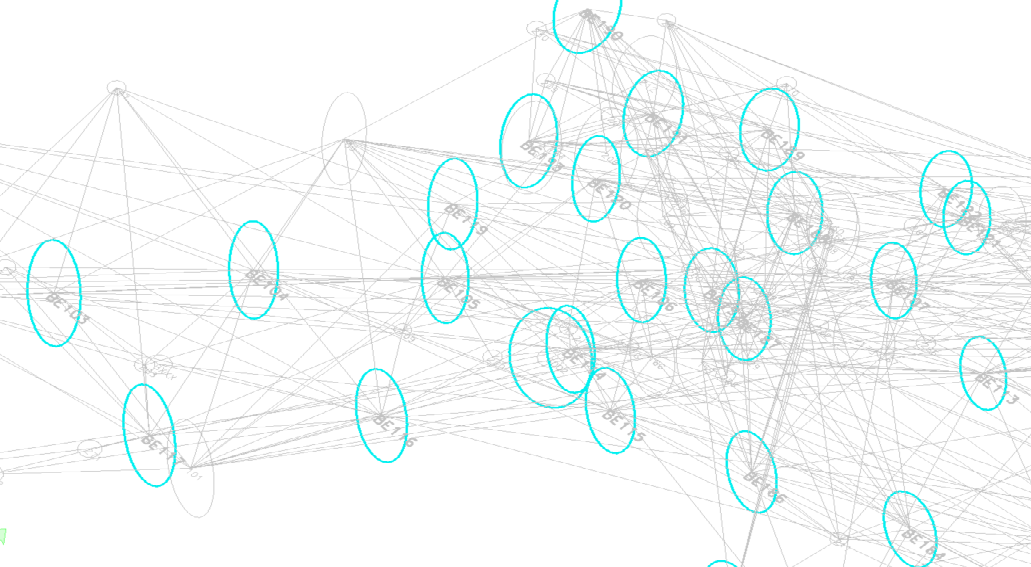
Fehlerellipsen sind ein wesentliches Element zur Beurteilung der Berechnungsqualität.
Sie geben Auskunft über das Vertrauen in die berechneten Koordinaten der Standorte.
Optimal ist es, wenn die Ellipsen klein und nahezu kreisförmig sind.
Sind sie zu groß, analysieren wir die Ursache und ergreifen entsprechende Korrekturmaßnahmen.
Dieser geodätische Ansatz gewährleistet volle Kontrolle über Genauigkeit und Ergebnisqualität.
Die Punktwolke bildet die Grundlage für alle weiteren Ausarbeitungen.
Fehler, die in dieser Phase entstehen, wirken sich auf sämtliche folgenden Projektabschnitte aus.
Deshalb legen wir bereits bei der Registrierung größten Wert auf Qualität und Berechnungsgenauigkeit.
Mehr...