This website uses cookies for analyzing traffic and improving user experience through Google Analytics. These cookies help us gather information about how you use our site. Your data is anonymized and is not used to identify users. Do you agree to the use of analytical cookies?
Podstawą naszych opracowań jest skanowanie laserowe metodą stacjonarną.
Skaner 3D ustawiany jest w odpowiednio dobranych miejscach tak, aby objąć pomiarem cały obiekt.
Metoda ta stanowi fundament rzetelnych i dokładnych opracowań.
W naszej praktyce wykorzystywaliśmy różne skanery, m.in. Riegl VZ-400, Z+F 5004, Z+F 5006i, Faro, Callidus oraz Leica P20.
Obecnie pracujemy głównie na skanerze Leica P40, który zapewnia najwyższą jakość i dokładność pomiaru.
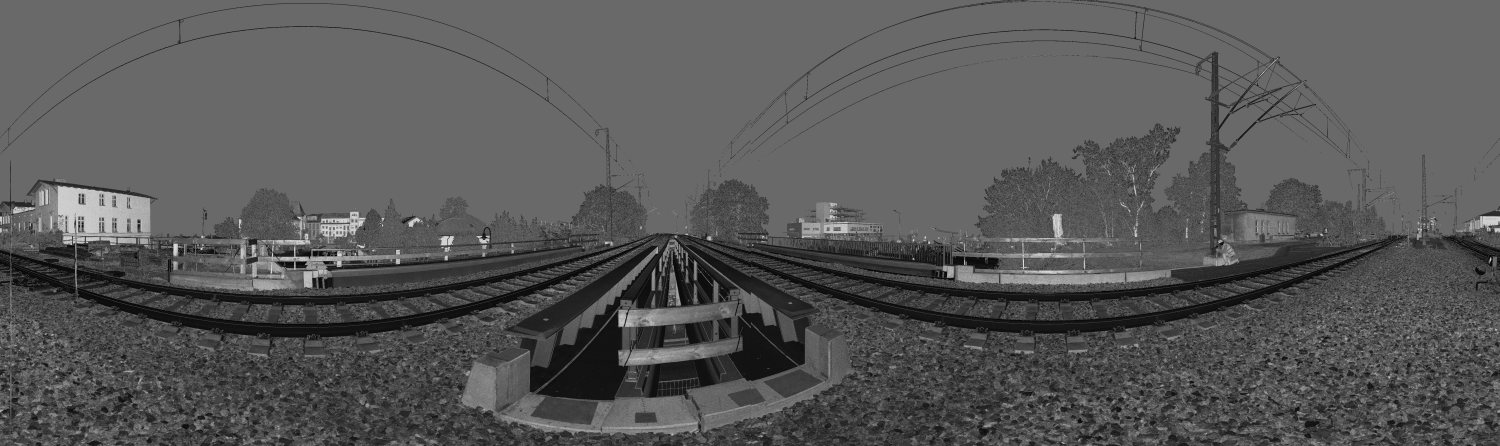
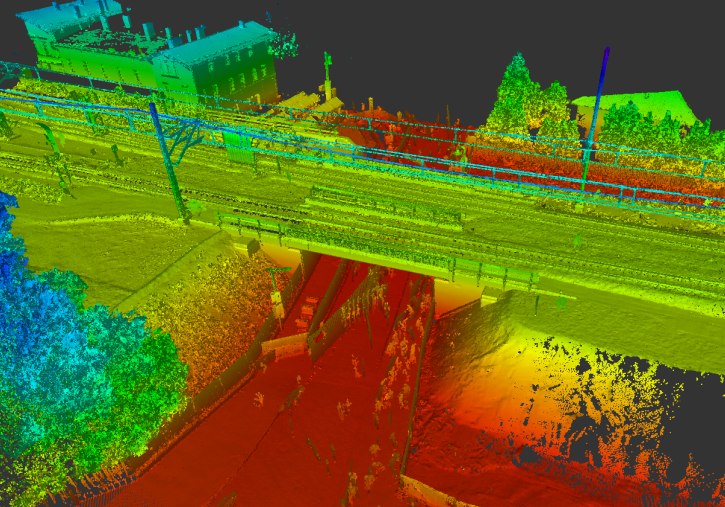
Skaner laserowy mierzy za pomocą wiązki lasera miliony punktów w swoim otoczeniu – rejestruje wszystko, co „widzi”.
Należy pamiętać, że elementy położone dalej będą mierzone z mniejszą gęstością, natomiast obiekty znajdujące się bliżej – znacznie dokładniej.
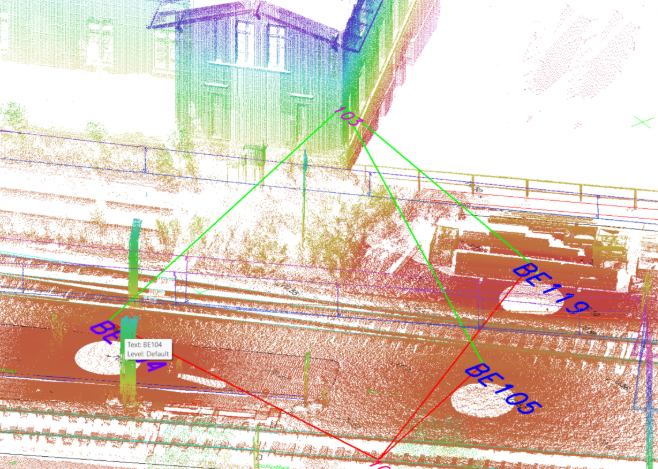
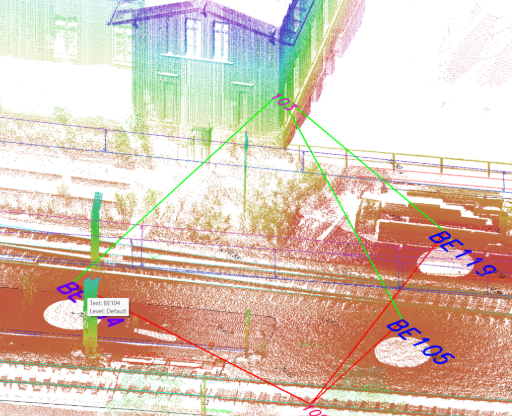
Na pierwszym przykładzie widoczna jest panorama przedstawiająca zakres widzenia skanera.
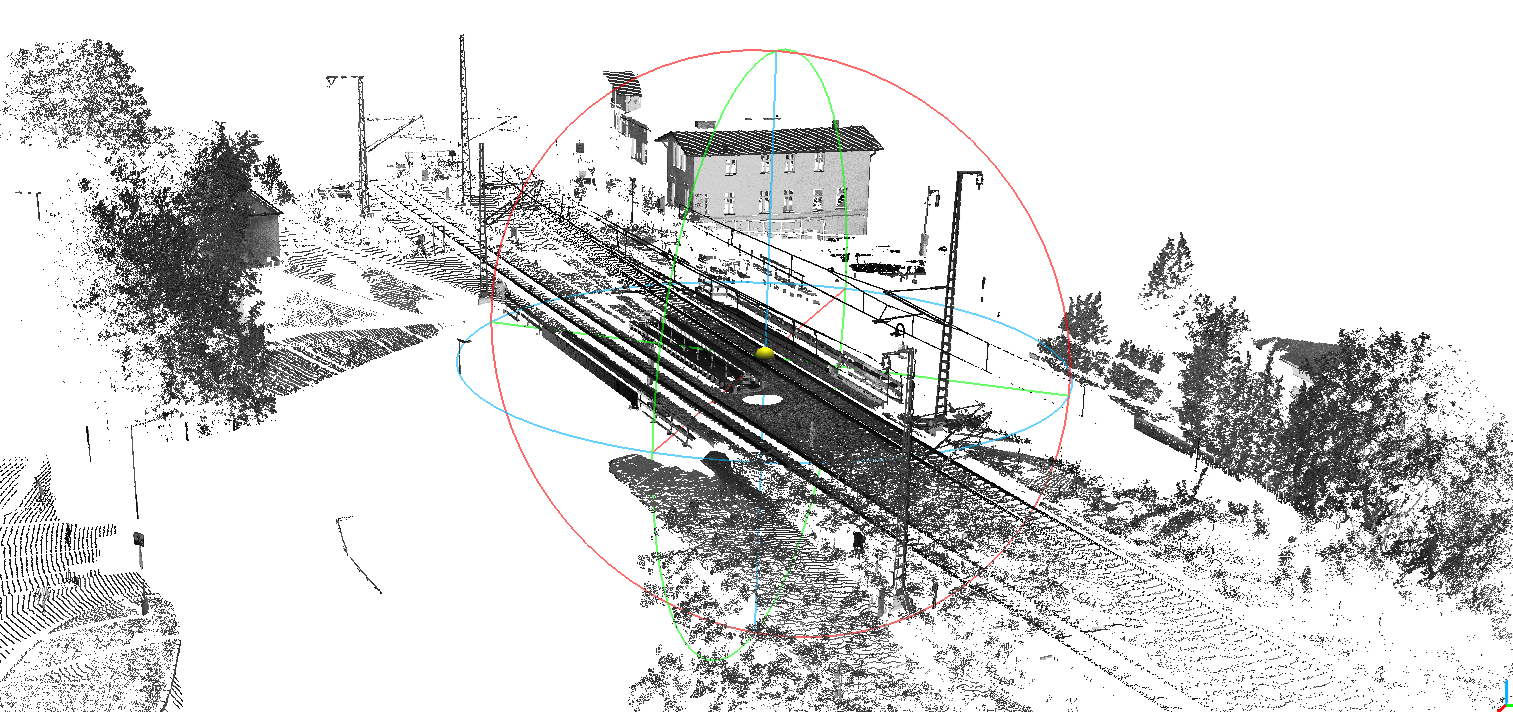
Drugi obraz pokazuje stanowisko pomiarowe oraz rzeczywisty zasięg skanowania.
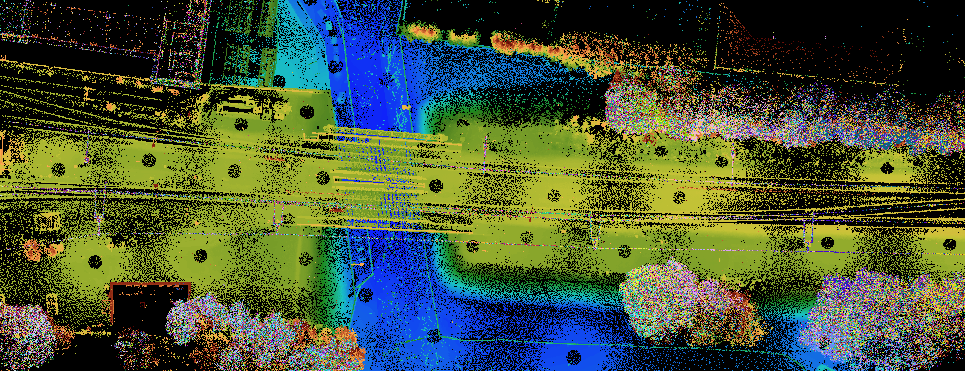
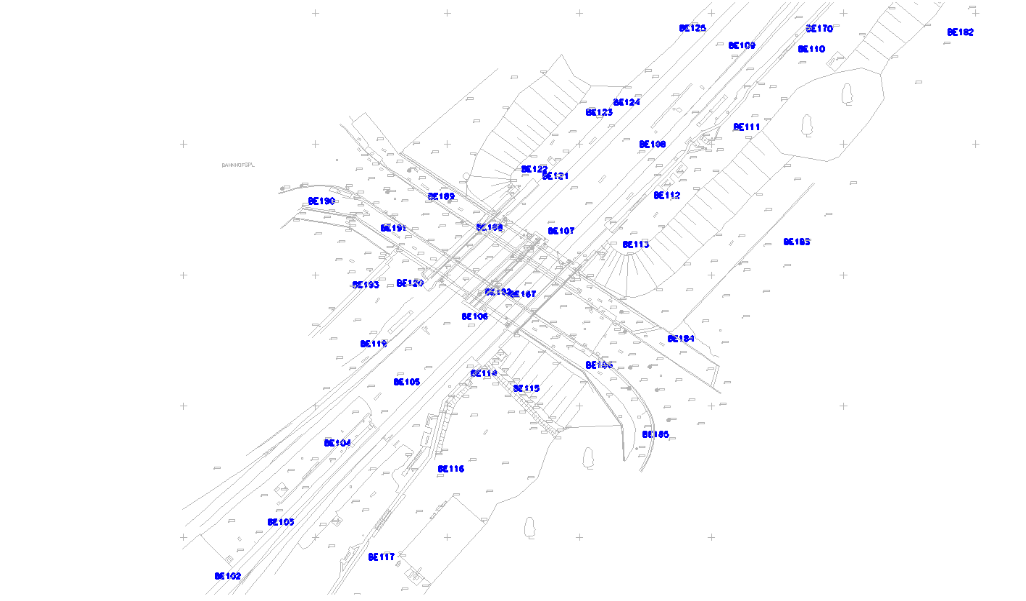
Na jednym obiekcie wykonujemy od kilkudziesięciu do kilku tysięcy skanów.
Widoczne okręgi oznaczają stanowiska skanera, a niebieskie numery identyfikują ich lokalizację.
Przed rozpoczęciem skanowania rozmieszczamy w wybranych miejscach tarcze pomiarowe, które dodatkowo mierzymy metodami geodezyjnymi.
W ten sposób uzyskujemy współrzędne punktów kontrolnych niezbędnych do obliczenia i wyrównania całej chmury punktów.
Rejestracja
Proces wyznaczania położenia stanowisk jest kluczowym etapem prac kameralnych.
To właśnie obliczenia zwane „rejestracją” łączą pojedyncze skany w jednolitą chmurę punktów.
Opracowaliśmy własne oprogramowanie oparte na sprawdzonych metodach geodezyjnych.
Wykorzystujemy rachunek wyrównawczy oraz metodę pośredniczącą, w której transformacji podlegają całe skany traktowane jako bryły sztywne (rigid body).
Transformacja spełnia warunek:
∑i=1n pi vi2 → min
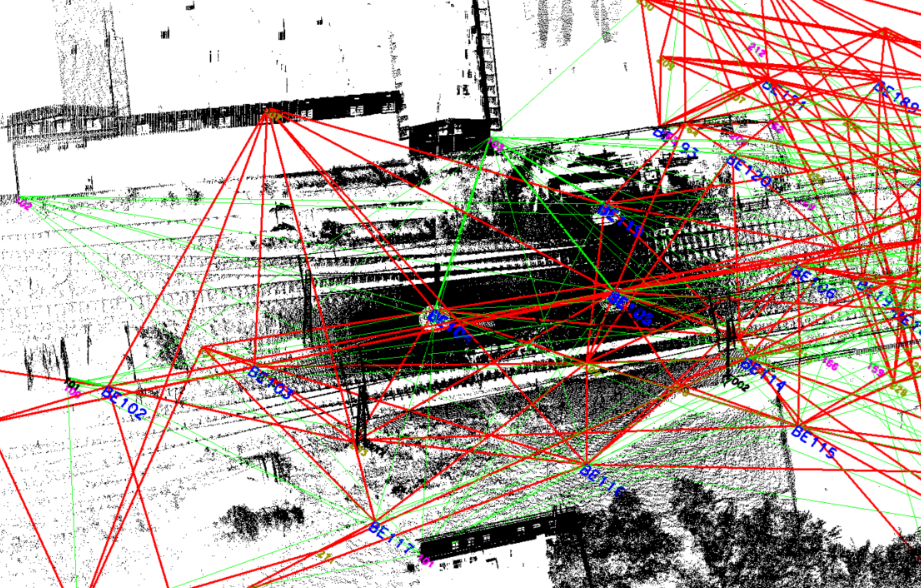
Obliczenia polegają na identyfikacji tych samych elementów w różnych skanach, np. narożnika budynku (XY) czy główki szyny (Z).
Mierząc odpowiednią liczbę punktów wiążących poszczególne skany, tworzymy gęstą sieć powiązań.
Obliczenia polegają na takim przesuwaniu i obracaniu skanów, aby połączenia w jak największym stopniu spełniały warunek sumy pvv = minimum.
Na tym etapie mamy pełną kontrolę nad procesem.
Możemy identyfikować punkty odstające, analizować przyczyny błędów oraz oceniać jakość punktów osnowy.
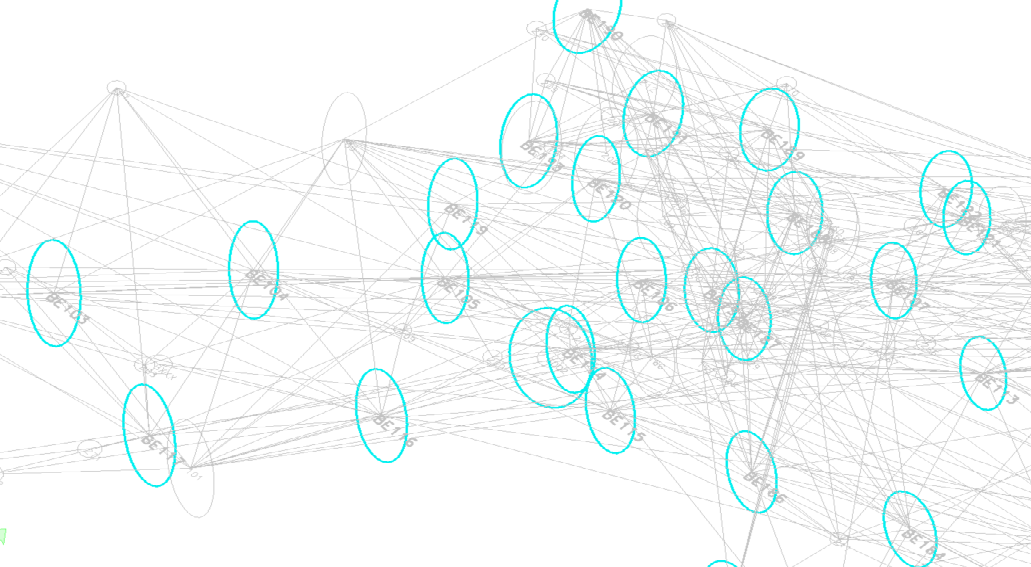
Elementem niezbędnym do oceny jakości obliczeń są elipsy błędów.
Informują one o poziomie zaufania do wyznaczonych współrzędnych stanowisk.
Optymalna sytuacja występuje wtedy, gdy elipsy są małe i zbliżone do okręgów.
Jeżeli ich rozmiar jest zbyt duży, analizujemy przyczynę i podejmujemy działania korygujące.
To podejście geodezyjne zapewnia pełną kontrolę nad dokładnością oraz jakością końcowego wyniku.
Chmura punktów stanowi podstawę wszystkich dalszych opracowań.
Błędy popełnione na tym etapie będą przenoszone na kolejne fazy projektu.
Dlatego przykładamy szczególną wagę do jakości i dokładności obliczeń już na etapie rejestracji.